
LRAUV: Arctic Oil-Spill-Mapping Robot Put to the Test




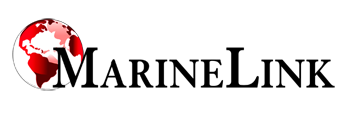
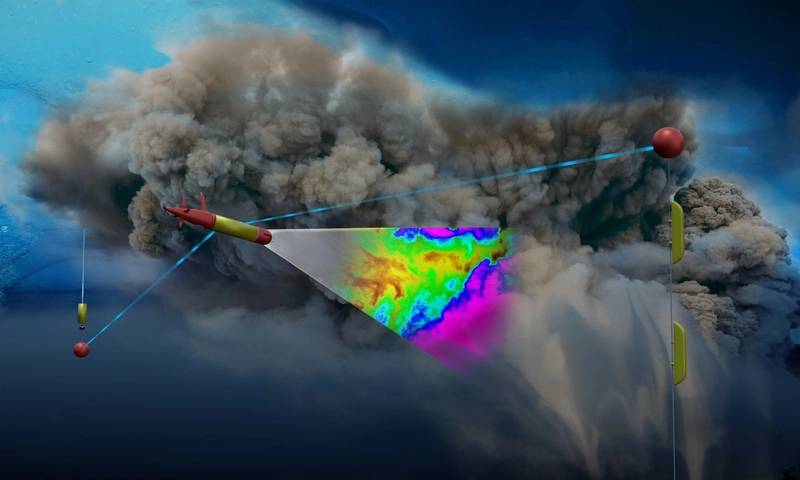 An artist’s depiction of LRAUV under sea ice. Using photo-chemical sensors, the robot scans the density of a billowing cloud of oil coming from an ocean floor well. The red and yellow objects are parts of a communication system consisting of antennas suspended under ice from a buoy installed on top of the ice. Graphic by ADAC.
An artist’s depiction of LRAUV under sea ice. Using photo-chemical sensors, the robot scans the density of a billowing cloud of oil coming from an ocean floor well. The red and yellow objects are parts of a communication system consisting of antennas suspended under ice from a buoy installed on top of the ice. Graphic by ADAC.
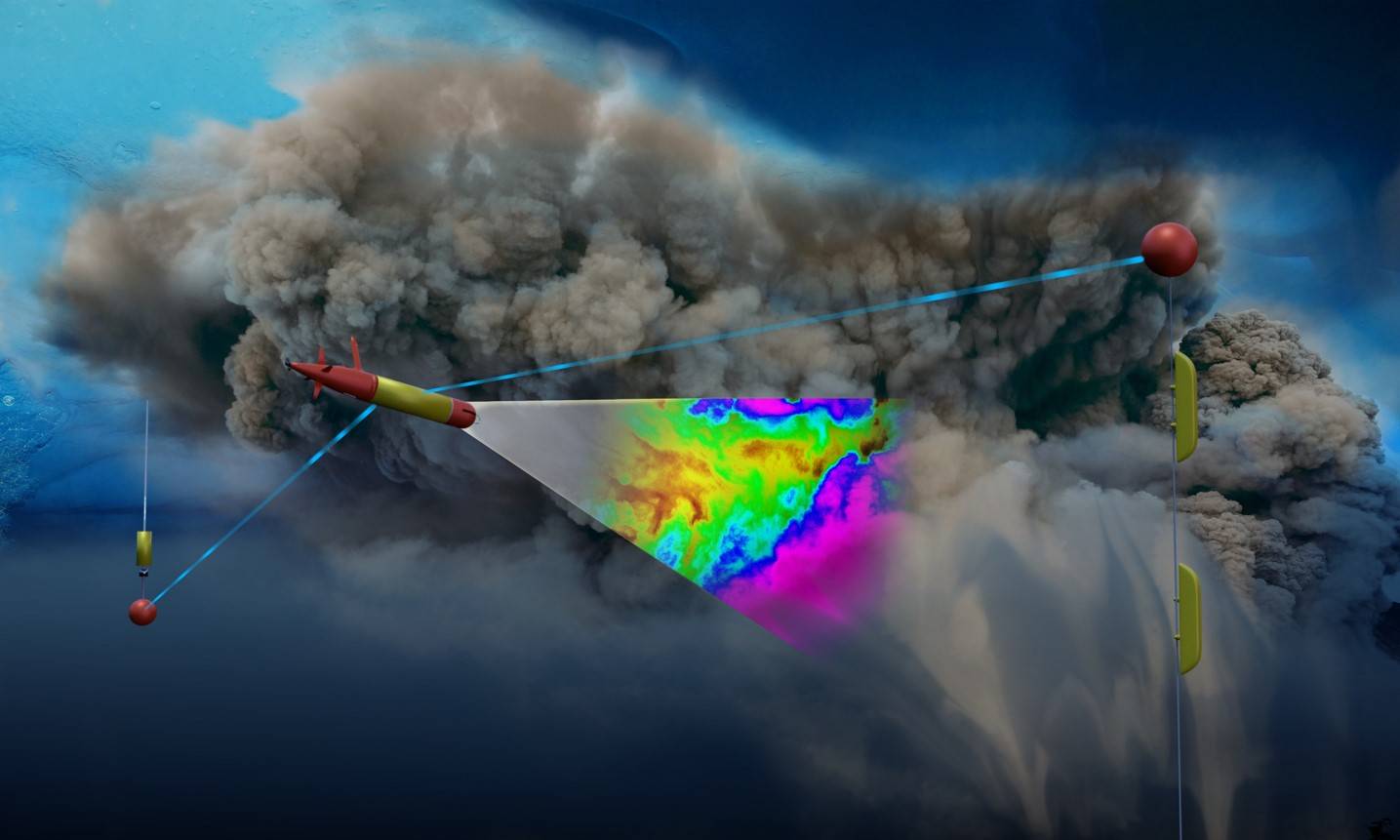
 Onboard the research vessel, the 3-D oil scanning robot LRAUV is ready to test its new configuration. Photo by U.S. Coast Guard.
Onboard the research vessel, the 3-D oil scanning robot LRAUV is ready to test its new configuration. Photo by U.S. Coast Guard.
As commercial shipping and energy activities picks up in the Arctic region, the prospect of accidental oil spills in this pristine environment remain a concern. In response, the U.S. Department of Homeland Security (DHS) is taking the lead – through the U.S. Coast Guard – to develop a subsea robotic system to map and report on spills.
“Because of ice coverage and the tyranny of distance, it is difficult to get resources and assets up in the Arctic in a quick manner,” said Kirsten Trego, Executive Director of the Coast Guard’s Interagency Coordinating Committee on Oil Pollution Research. “With better real-time data, more effective response strategies can be developed and deployed.”
To help the Coast Guard map oil spills under ice, the DHS Science and Technology Directorate (S&T) has been working on an underwater robot for the past four years through a DHS Center of Excellence, the Arctic Domain Awareness Center (ADAC) at the University of Alaska Anchorage, in partnership with the Woods Hole Oceanographic Institution (WHOI) and Monterey Bay Aquarium Research Institute.
The result of this research is the Tethys Long Range Autonomic Underwater Vehicle or LRAUV, a helicopter-portable, torpedo-shaped system with oil sensors and navigation capabilities. This robot can provide real-time data for first responders by producing and transmitting 3-D maps of crude oil, diesel, gasoline and kerosene spills. ADAC recently tested this technology in California and plans to do more tests this year and next, including under-ice tests.
Meet LRAUV
Work on LRAUV started in January 2015, the idea born from the stress around the Deep Water Horizon spill in the Gulf of Mexico in 2010, which was measured with “limited sensors and short duration platforms,” said S&T Program Manager Theo Gemelas.
To help address the problem of duration, LRAUV – which measures eight feel long, is 12 inches wide and weighs 240 pounds – is designed to rove for 15 days and 373 miles without recharging batteries, with the latest prototype able to travel 2-4 feet per second (1-3 miles per hour), communicating with specially installed buoys.
Since there is no cellular coverage in the vast Arctic, the buoys – equipped with Very High Frequency antennas to transmit data via satellites – are a key component to the LRAUV’s success. When deployed, the buoys will provide solar or wave power to recharge the robot’s batteries, an effective way to keep it charged in such remote conditions.
“This vehicle is the first of its kind. We haven’t previously been able to characterize oil spills with an underwater vehicle under solid ice pack,” said ADAC Executive Director retired Major General Randy “Church” Kee. LRAUV Put to the Test: Researchers simulated an oil spill by releasing a neon green biodegradable dye from a vessel of the Monterey Bay Aquarium Research Institute (left), while representatives from the Coast Guard, ADAC, WHOI, S&T and other organizations watched from another boat on the right. Photo by U.S. Coast Guard.LRAUV Put to the Test
LRAUV Put to the Test: Researchers simulated an oil spill by releasing a neon green biodegradable dye from a vessel of the Monterey Bay Aquarium Research Institute (left), while representatives from the Coast Guard, ADAC, WHOI, S&T and other organizations watched from another boat on the right. Photo by U.S. Coast Guard.LRAUV Put to the Test
On September 27, 2018, ADAC conducted an open-water test of its LRAUV prototype in Monterey Bay, California, with the goal to characterize an oil spill and transmit data back to shore.
“The researchers showed us how LRAUV works; this was the first test with the oil sensors and data transmission in action,” said Trego.
LRAUV was equipped with chemical sensors and simulated an oil spill from a vessel by “leaking” a non-toxic, neon green sea dye into the water. The dye, just like oil, can float in the top 13 feet of the water column, but biodegrades in sunlight in a matter of hours.
“This specific water test was intended to check all the prior work in the newly fabricated vehicle to characterize an oil spill,” said Kee.
The robot surfaced every few minutes to transmit and receive data from the control vessel and check its location using cellular connection. After several hours, LRAUV had scanned successfully the whole area and transmitted the data to shore for analysis.
What’s Next?
LRAUV is currently being prepared for transport to WHOI in Woods Hole, Massachusetts, where the next test will take place. Researchers will process the navigation performance data from the test and will tune the navigation algorithms according to the results. Then the team will make three communication buoys and will test them with the robot under ice. The team is targeting to conduct the under-ice test in a large lake in New Hampshire, the Eastern Great Lakes, or Alaska during the winter season.
ADAC plans to complete all rigorous testing – including under-ice tests – and the construction of communication relay buoys by the end of June 2019.







