
Robotics in the EngineRoom




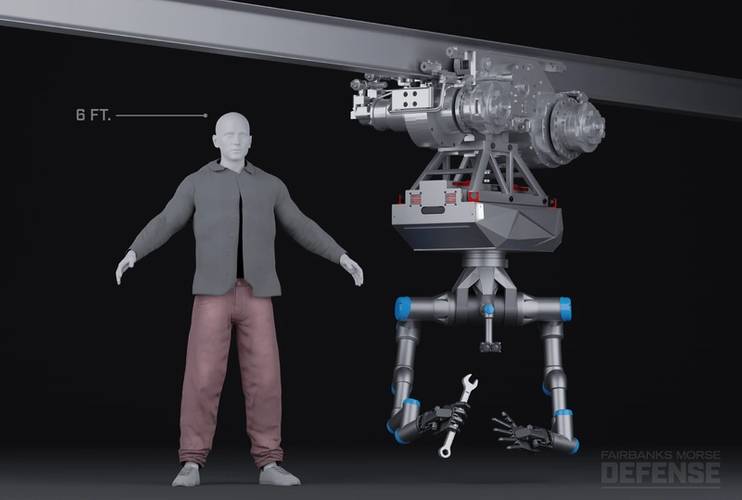 Image courtesy FMD
Image courtesy FMD
 Image courtesy FMD
Image courtesy FMD

When talk turns to autonomous ships, a first question always centers on how routine and emergency repair and maintenance will be conducted. Trey Taylor, Director of Digital Innovation, Fairbanks Morse Defense (FMD), discusses FMD’s research and development on next-gen engine room robotics.
The FMD team that Trey Taylor leads is relatively new, kicking off in 2019 with a baseline product that was looking at monitoring equipment, “being able to provide that information back to our technical teams for diagnosis and also to give some data to the end customer for self-support.” But that was just the start, and in 2020 Taylor’s team pitched the executive team for more. The result was “a roadmap for five product verticals that we were interested in: AI, autonomy, robotics, mixed reality capability and secure communications.”
In the development of robotic solutions for routine and emergency work and repair in the engine room, Taylor credits his boss, FMD CEO George Whittier, for instilling his principle: “Don’t aim at the target, aim where the target’s going to be.”
So, Taylor and his team of 22 started looking more closely at one of its prime customers – the U.S. Navy. “We know that the Navy has a need, a desire to fill uncrewed assets sometime later this decade, and the timeframe that they want these assets to be on deployment without intervention is today only about 30 to 60 days,” said Taylor. “But the long-term goal is 180 days, so our team started looking at systems for how to help the Navy achieve that goal. We quickly came to the conclusion that we’re going to have to do maintenance, but how do we do maintenance when there’s not a human on board?” Enter the robot.
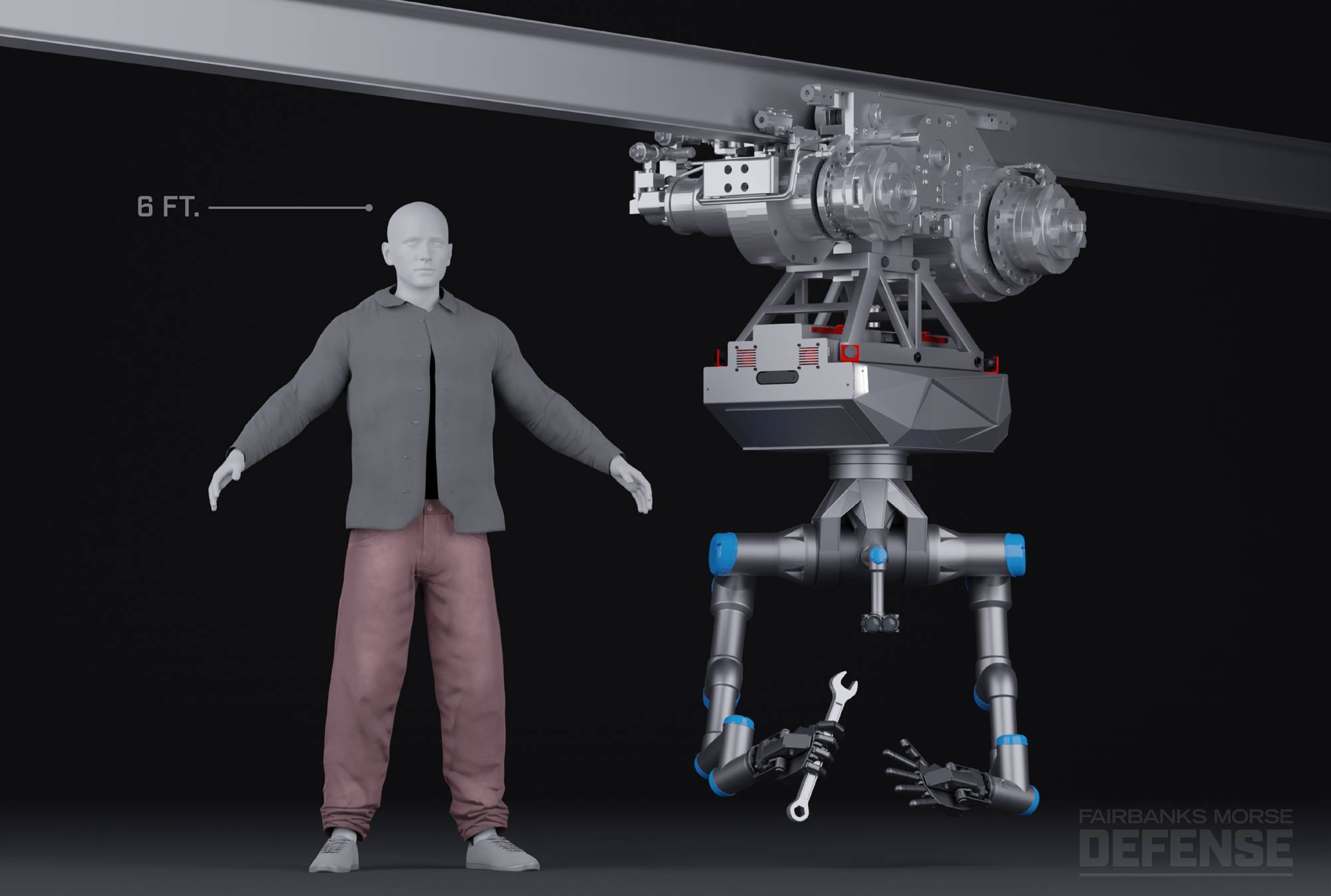
 “You’re going to need different capabilities at different times,” said Taylor. “For instance, if I’m doing something on an engine, I might need to be able to lift and support 150-200 pounds; but I may also need some very fine manipulation of small fittings to remove that part. So I probably won’t have a bipedal two-armed robot. I will have a robot that can support itself either on a rail or a bulkhead for that heavy lift, and it may have four arms, two gross movement arms that can handle the heavy lift, and then two fine skilled arms that are doing the fine fixture movements.”
“You’re going to need different capabilities at different times,” said Taylor. “For instance, if I’m doing something on an engine, I might need to be able to lift and support 150-200 pounds; but I may also need some very fine manipulation of small fittings to remove that part. So I probably won’t have a bipedal two-armed robot. I will have a robot that can support itself either on a rail or a bulkhead for that heavy lift, and it may have four arms, two gross movement arms that can handle the heavy lift, and then two fine skilled arms that are doing the fine fixture movements.”
Image courtesy FMD
Today, FMD’s work centers not on a single solution, rather a number of different manifestations of how engine room robotics will look and work. “We decided a robot platform is probably going to be the right approach, but we want to make sure that we understand the problems and we understand the actual product requirements that a robot would have to facilitate,” said Taylor, a process which meant understanding the Navy’s long-term roadmap.Per usual in the maritime space, there is rarely if ever a ‘one size fits all’ technical solution premised on the broad variety of ship designs. “There’s a lot of key challenges working in a marine environment,” said Taylor. “I have bulkheads that I have to pass through; I have confined spaces and open spaces. In some cases, I might want to have a robotics platform that’s mounted on a bulkhead; in some cases, I will transit on a rail; in some cases I’ll be asked to move through the space with either tracked or walking design. So when we are looking at the robotics platform, we’re really focused today on the modularity and those sub components.”
Apart from the mechanical, the operational environment is a consideration. “How do I do service when I’m in a six foot trough on a vessel that’s moving at 20 knots through it?,” asks Taylor. “A human’s very good at figuring out their own stabilization, three points of contact, one hand holding a tool. A robot’s got to be able to do the same thing.” In bringing it down to its core essence, Taylor said to envision it as Legos.
“There are core components that every robot’s going to need: some basic autonomy, some basic AI, the way that you train it to move, the way you control it remotely, vision systems, et cetera, that are common platform items. But then when I think about all the pieces of equipment I’m going to change or interact with, I might need 15, 20 different tools of different sizes. I’m going to need different lifting capacities; and all of that requires the ability for our platform to be able to adapt to it; self-change parts to go to a specific work location or different configurations on that robot. But I want a common control methodology; I want a common charging methodology; I want a common autonomy methodology.”
Ultimately, it boils down to the guiding principle surrounding any complex technology: keep it simple, which is far easier said than done.
“You’re going to need different capabilities at different times,” said Taylor. “For instance, if I’m doing something on an engine, I might need to be able to lift and support 150-200 pounds; but I may also need some very fine manipulation of small fittings to remove that part. So I probably won’t have a bipedal two-armed robot. I will have a robot that can support itself either on a rail or a bulkhead for that heavy lift, and it may have four arms, two gross movement arms that can handle the heavy lift, and then two fine skilled arms that are doing the fine fixture movements.”
Ultimately, if successful with broad adoption, the use of robotics in the engine room could change the actual design of the engine itself. At the outset, the robotics must be designed to conduct its business as if it were a human, so at a minimum FMD is designing [robotics] to be human equivalent in strength and range in motion.
But as autonomy gains steam, there will be a gap. “It’ll be a bit of a gap between when these uncrewed vessels start to be launched before there’s enough of them in the fleet that the capital equipment suppliers will redesign their systems for robotic support,” said Taylor. “So we have to bind a gap where we have human equivalent performance in a lot of cases, for tool manipulation, for reach, for degrees of freedom of movement, the kinematics of actually moving parts on and off a piece of equipment, for example: we’re taking that into account in our designs today.”
“Today, we’re at what we call generation 0.2, where we have a prototype that moves. We have control features with limited sensing on board, but there’s a lot of data-driven research that we need to do to influence the next generation. Right now we’re going through a scientific evaluation of the basic and major maintenance procedures on an engine, where we’re doing mapping: What are the number of fittings? What are the sizes? What’s the volume that I have to perform the services as a human? How much torque do I need on any individual fitting in these maintenance procedures? We’re doing that documentation right now, as we speak, on our engines, which will probably take us through this entire year [2023],” with the plan to have a basic platform by 2025.
As published in the December 2023 edition of Maritime Reporter & Engineering News. Watch the full interview with Trey Taylor on Maritime Reporter TV:
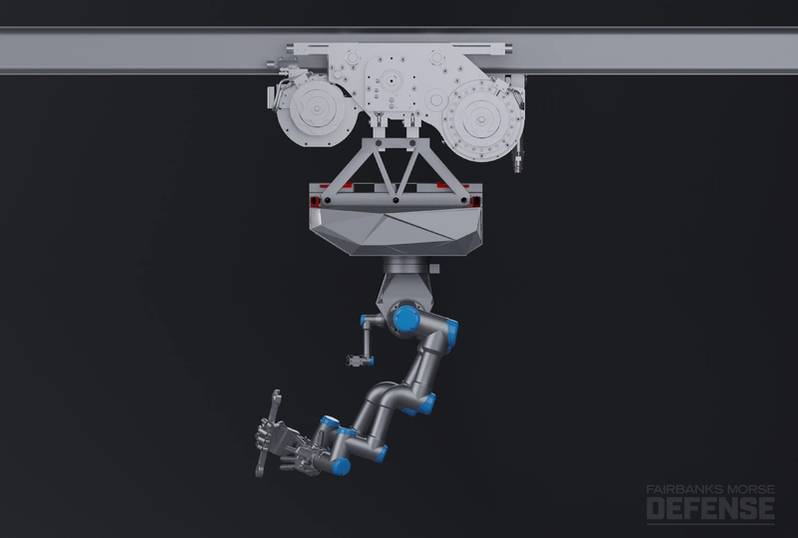 Image courtesy FMD
Image courtesy FMD