
MTR100: Five "Ones to Watch"




 Saipem’s Hydrone R – in the flesh and ready for real world testing. Image from Saipem.
Saipem’s Hydrone R – in the flesh and ready for real world testing. Image from Saipem.
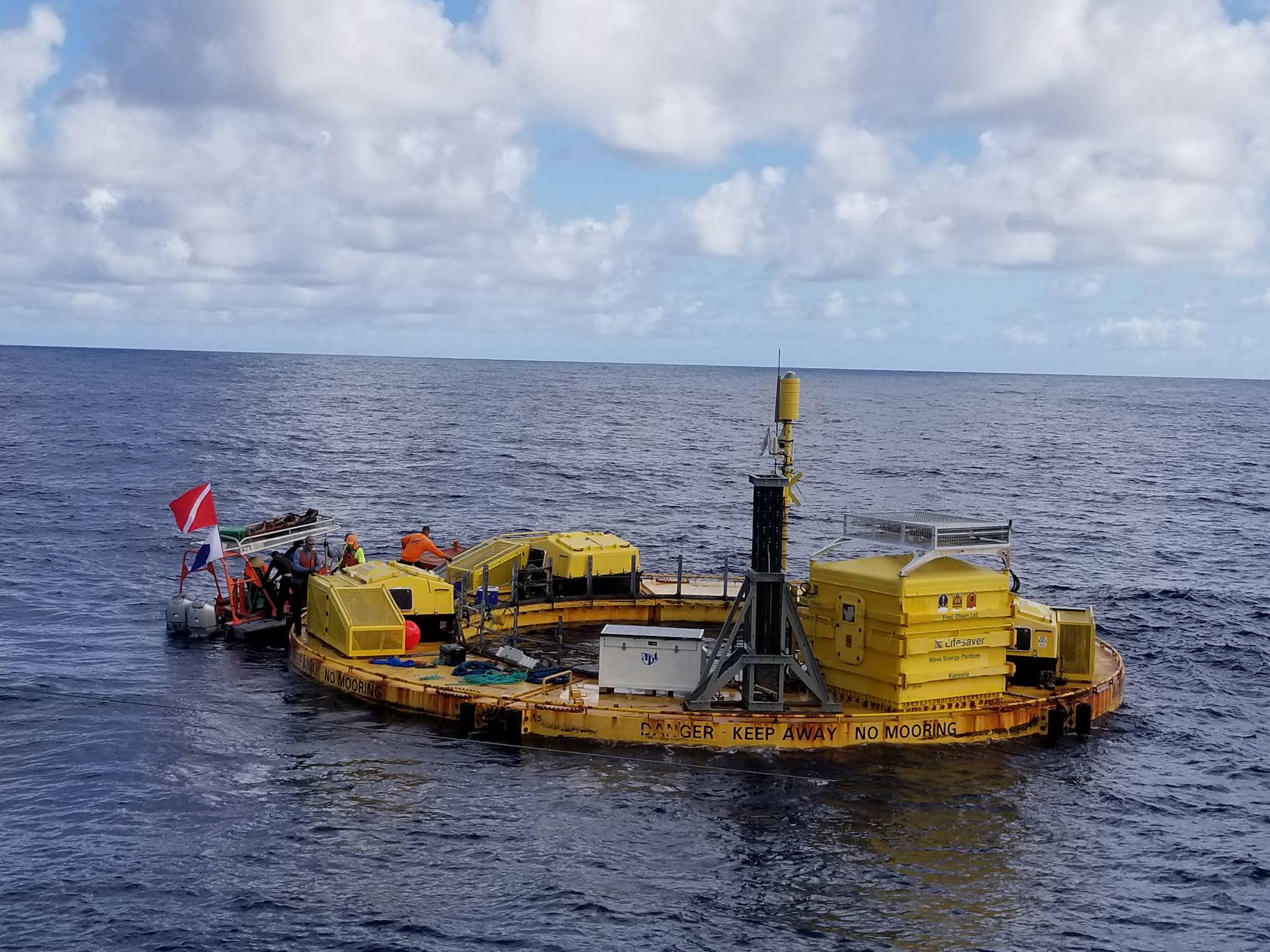
 BOLT Lifesaver installed @ WETS. Image credit - Pacific Marine Energy Center.
BOLT Lifesaver installed @ WETS. Image credit - Pacific Marine Energy Center.

For Marine Technology Reporter's (MTR) 14th Annual "MTR100" - a look at 100 innovators and technologies in the subsea space - MTR editor-at-large Elaine Maslin reports on five companies and technologies that are worth the watch for the remainder of 2019 and beyond. For the full edition, see https://magazines.marinelink.com/nwm/MarineTechnology/201907/
Blue Logic: Entering a new era
Completely new modes of operation are entering the underwater domain for oil and gas operations and the tools that are being used could also be used across the ocean space.
It’s been called a subsea space race – and it is a little like a Mars mission, with similar communications challenges and questions around power supplies. Various players are working to make it happen. The idea is to have subsea resident vehicles, eliminating the need for manned surface vessels and the limitations on launch and recovery posed by bad weather. Elaine Maslin takes a look at five companies operating in this space.
One is Blue Logic, based near Stavanger in Norway. While it’s not the only firm producing inductive subsea connectors (WiSub, near Bergen is doing similar), Blue Logic has been heavily involved in building a key piece of the infrastructure that will enable so-called resident subsea vehicles to remain subsea for long periods performing inspection and intervention operations. It’s the subsea docking station (SDS) for Equinor’s underwater intervention drone concept (UiD – a name trademarked by Equinor). Two have so far been built, with one now installed in 365m water depth offshore Trondheim, at an open test lab run by the Norwegian University of Science and Technology (NTNU), and another due to be installed at the Aasgard field offshore Norway, following a detour to Sweden, where it was trailed with a Saab Seaeye Sabertooth AUV. Equinor not only outsourced the creation of these SDSs, but it’s also making the design freely available – because it wants all vehicle vendors to use it (open innovation).
Blue Logic’s founders produced their first inductive connector for power and high-speed communication in 2006, following 12 years work. In 2010, they founded Blue Logic and since then the company has been improving their inductive connectors, for power and communications transfer, and new power alternatives ranging from 50W to 2.3kW, all with ethernet and serial communication speeds up to 80 Mbps and 230kbps respectively. It’s also working on a next generation 9.2kW connector, as well as other types of mechanical and hydraulic connectors for drones.
Blue Logic has also developed a new torque tool for AUVs and ROVs. Its previous torque tool weighed 23kg in water, which would have been too heavy for a vehicle like the Eelume snake robot, says Helge Sverre Eide, Blue Logic’s business manager. So engineer Lars Gunnar Hodnefjell worked on a lighter version - 7.5kg in fact (improving the world record by 50% weight reduction)- using titanium and plastic – producing 3000Nm of torque. It’s since been used by the Eelume, which is due to operate out on the SDS at Asgard on a tethered trial.
But, “For this (subsea resident vehicles) to be economical, you need to increase the scope of work for drones,” says Eide. “So, you need new tools and you need to adjust or change the subsea production system. You need to change both sides of the equation. New tools must be lightweight so a drone can fly them. Subsea maintenance of systems needs to change to smaller portions to change out sensors and other components by use of drones.”
The current SDS design has two 2kW, and two 50W Blue Logic connector and one 250W WiSub connector, markings - AruCo and ChaRuCo – which drone cameras can see and from which they can decide their position relative to them, and acoustic positioning from Trondheim based Water Linked. In future, the magnetic field of Blue Logic’s the inductive connector could also be used to guide the drone on to the SDS, says Eide.
Blue Logic is in the Subsea Wireless Group (SWiG), which is working to standardise subsea wireless communications also.
Saab Seaeye: Doing it for real Saab Seaeye’s Sabertooth during a demo with Equinor’s subsea docking station. Images: Saab Seaeye. Sweden’s Saab Seaeye has been one of those driving the vehicle side of the equation – for at least 10 years.
Saab Seaeye’s Sabertooth during a demo with Equinor’s subsea docking station. Images: Saab Seaeye. Sweden’s Saab Seaeye has been one of those driving the vehicle side of the equation – for at least 10 years.
The firm has some 50% of the world market of electric remote operated vehicles (ROVs) and it has delivered more than 1000 electric autonomous underwater vehicle (AUV) and ROV and hybrid vehicles. Earlier this year, during its eRobotics Spring Campaign, Saab Seaeye demonstrated its Sabertooth AUV’s ability to dock in a safe and controlled manner at a remote sub-resident docking station, where it could access tooling packages, be recharged and transfer data, including new mission plans, using Blue Logic inductive connectors. It could do this automatically, without the need for human control.
In June, the firm performed docking, charging and communications on Equinor’s SDS, in Lake Vattern, Sweden. While the final part of the docking during this exercise was via semi-automated controls, with a bit of programming the vehicle would be able to dock autonomously, says Jan Siesjö, Chief Engineer, at Saab Seaeye.
The firm has been working on this concept for more than 10 years, developing the 3000m-rated Sabertooth’s now advanced capability and control systems. The idea has since been supported by the likes of ENI, while parallel developments in inductive underwater charging and data transmission technology, and underwater video capable communications, and the development of standardised docking stations, have helped see the market start to catch up.
“It is the only hovering autonomous system that can operate in both AUV and ROV modes and handle connections in both the horizontal and vertical plane,” says Peter Erkers, sales director at Saab Seaeye. “And it is the only vehicle currently on the market capable of undertaking long-term residency in difficult to access locations.”
Saab Seaeye has also been working on other systems, such as remote operability of its light world class Leopard ROV. It’s been working with Boeing doing trials over a satellite link across the US, controlling the ROV to do manipulator work, mating connectors, flying missions and way point control. Even when the latency was pushed to up to three seconds and data rates “messed with”, the system still performed, says Siesjö.
Meanwhile, Saab Seaeye is also working on a full work class electrical manipulator. Testing work is ongoing with plans to reveal more to the market next year. The company has also been developing and trailing 3D simultaneous localisation and mapping technologies based on an in-stereo camera system developed in Saab some time ago.
Saipem: Moving from concept to reality
Another vehicle operator has been testing its new system; Saipem with its Hydrone. In June, the Hydrone R started a six-month trial in Saipem’s underwater “play park” near Trieste, northeast Italy. Later in the year, or early next year, its FlatFish design is also expected to enter the water, ahead of deep-water trials in 2021. Flatfish is under license from Shell (which bought BG Group, which had in turn been developing the FlatFish concept with Brazilian and German institutions).
Hydrone is in fact part of a family of electric subsea vehicles – from tethered resident work class vehicles through to hybrid AUVs with station keeping features, ranging from high bandwidth real-time control and communications through to low band-width acoustics and autonomous operations - rather than having one vehicle that can do everything. The designs encompass seabed resident systems as well as surface deployed systems, e.g. from a vessel or floating production system.
Hydrone R (for resident) is the first out of the box. It’s described as a hybrid ROV with AUV capabilities, e.g. it will have manipulators, for intervention work, and can work on a tether (up to a radius of 300m), but also travel distances between subsea fields, untethered, like an AUV, and both either from a seabed garage or a surface deployed system on a mission basis but also able to recharge subsea, Stefano Meggio, Subsea Robotics Technical Manager at Saipem told the energy: connected (aka Subsea Valley) conference in Oslo earlier this year. Rated to 3,000m, it could operate for 8-10 hours without a tether, and out to 10km, when it’s returning to the same base, or 20km, if it’s transiting to another base.
Saipem is also developing a range of HyTool skids, suitable for all its vehicles, so they can swap them subsea. It’s also developing HyBases; docking stations that would be deployed to provide a communication interface via a subsea production system or to onshore with a direct link or via a surface vessel, and access to those interchangeable payloads where needed. Furthermore, a HyLars, a flying garage deploy from surface host (possibly unmanned), would provide a garage suspended subsea or deployed at seabed for recharging or recovery. Then, HyBuoy, using buoy, with renewable power generation, where subsea infrastructure is unavailable, could provide power and communications to a Hybase on the seabed.
There’s also the HyVessel concept, an autonomous surface vessel which could make the subsea system aware of situation and provide supervision capability to an onshore control center.
Meggio says that the commercial solutions for recharging and underwater communications – “acoustic, optical, or whatever the market will bring” – are in now the market. “It’s just a matter of integrating them.” Then, it’s just a case of integrating them.
OPT: Powering autonomy Ready for offshore deployment, the PowerBuoy destined to work for Premier Oil. Image from OPT.In some cases, resident underwater vehicles may not have access to power, so alternative power sources may be needed.
Ready for offshore deployment, the PowerBuoy destined to work for Premier Oil. Image from OPT.In some cases, resident underwater vehicles may not have access to power, so alternative power sources may be needed.
New Jersey, US, based Ocean Power Technologies (OPT) has been a leading company in this area, working with Italian oil company ENI.
An OPT PB3 PowerBuoy® was installed, using a three-point mooring system, in November 2018, near ENI’s Amelia B platform in the Adriatic Sea, where it’s providing energy to a mock-up of a subsea system. A wave buoy was installed near it, to help monitor performance.
Earlier this year, OPT said the system had demonstrated AUV charging capabilities, successfully sending power and communications to a subsea payload throughout the test period. OPT said that the system was being tested as a standalone charging station and communications platform.
OPT also has other ideas. In fact, another PB3 PowerBouy was recently shipped to the UK ahead of being sent out into the North Sea to work for Premier Oil, providing power for monitoring a safety zone around suspended wells in the Huntington field, as well as providing communications to shore. Its potential for future use, generating power to operate subsea assets, is also being assessed.
The company is also designing a hybrid PowerBuoy, which uses liquid fuel for power generation and lithium ion batteries, to ensure continuous peak power and communications. This is being designed to provide more than 1 MWhr of energy (scalable) and operate for up to 10 years with minimal maintenance.
The trial in Italy is part of ENI’s MaREnergy project, which is targeting the use of wave energy converters to power subsea monitoring and control systems and to support charging AUVs.
Using something like a PowerBuoy, a point absorber technology which captures the energy created when waves send a float up and down a moored spar, motion which is used to generate power, could provide that power and communications link.
OPT’s PB3 device would be suitable for lower power requirements and where it would be complicated to provide power other ways, such as remote areas, providing environmental monitoring for engineering and development operations and monitoring and control of low power subsea and topside equipment, Andrea Alessi, Offshore Renewable Energy Program Manager, ENI, told the Offshore Mediterranean Conference (OMC) in Italy earlier this year.
This could even extend to powering electric actuators and AUVs, including those forming ENI’s Clean Sea concept, as well as creating security cordons around offshore platforms during decommissioning or other activities to avoid using a manned vessel.
Fred. Olsen: A BOLT from the blue Adaptable monitoring package. Image credit: Sea Engineering, Inc.There are always ways to do things differently, however, Fred. Olsen has been working on a wave energy design called BOLT. It’s based on a floating platform attached to the seabed via moorings that are in turn attached to a specialized winch line product, which wind in and out of winches (one to three, depending on power requirements) as the sea surges. The winding motion creates energy – up to 10kW of average, exportable power with a standard unit in a high sea state - converted to electricity on board the facility via a custom designed maintenance free gear box and a standard Siemens generator set.Even Hjetland, engineering manager for BOLT Sea Power, says it’s a design that’s been worked on for more than 12 years but that now has experience operating offshore Norway, the UK and in the Pacific (at a US Navy site off Hawaii). One of its next jobs is to provide a platform for a temporary 4G base station in the North Sea, working with communications firm Tampnet, to support field construction operations.
Adaptable monitoring package. Image credit: Sea Engineering, Inc.There are always ways to do things differently, however, Fred. Olsen has been working on a wave energy design called BOLT. It’s based on a floating platform attached to the seabed via moorings that are in turn attached to a specialized winch line product, which wind in and out of winches (one to three, depending on power requirements) as the sea surges. The winding motion creates energy – up to 10kW of average, exportable power with a standard unit in a high sea state - converted to electricity on board the facility via a custom designed maintenance free gear box and a standard Siemens generator set.Even Hjetland, engineering manager for BOLT Sea Power, says it’s a design that’s been worked on for more than 12 years but that now has experience operating offshore Norway, the UK and in the Pacific (at a US Navy site off Hawaii). One of its next jobs is to provide a platform for a temporary 4G base station in the North Sea, working with communications firm Tampnet, to support field construction operations.
The lines used to drive the winches are UV (sunlight) and marine growth resistant, and the system still generates power in relatively calm sea states, says Hjetland. A system with one winch would be just 5m-diameter and weight 10-tonne, with up to 500kW of energy storage on-board.
Trials have included operations with the U.S. Naval Facilities Engineering Command, powering external oceanographic subsea sensors – including cameras and sonar systems - that were previously cabled, from a 30m test berth of the Navy’s Wave Energy Test Site (WETS), located offshore of Marine Corps Base Hawaii, near Kaneohe, on Oahu.
The system also included an underwater data-logging and non-contact power transfer solution, suitable for charging AUVs, developed by Seattle-based startup, WiBotic. Part of this project also tested the ability to transfer power through the winch/mooring line itself, which would remove the need for an umbilical to subsea power users.
“We’re working with Tampnet next year to provide a floating, standalone 4G mast, by pulling a fiber cable from their existing network of subsea fiber cables and then beaming communication service during field construction phase when communication isn’t otherwise available,” says Hjetland. The floating structure will also house solar panels. The specific construction site has yet to be decided – it could be oil and gas or renewables.
“It could also be a platform for flying drones from for wind farm blade inspection,” he adds, “or at coastal fish farms. For oil and gas, standalone power and communications can offer charging power and control power. A UiD docking station could be installed wherever you want, instead of where power and communications are available.”